
Cyber-physical Assistance Systems
In the field of cyber-physical assistance systems, new approaches to smart and networked body-worn assistance are researched to maintain, restore or increase human mobility
The main topics are:
- Conception Methodology and Drive Technologies for Body-Worn Mechatronic Systems
- Novel methods for recording human vital signs and biosignals Intuitive human-technology interaction with body-worn technology for needs-based user support and assistance
- Real-time data acquisition and processing for direct interaction with/from physical assistance systems (e.g. networked exoskeletons)

Human Modeling and Ergonomics
In the field of human modelling and ergonomics, the ergonomic and biomechanical relationships in the direct interaction of humans with physical assistance systems, in particular with the help of digital human models, are researched. For this purpose, physiological real data will be collected on humans and processed in a real-time capable data infrastructure, among other things. The necessary human-centered methods are developed and evaluated for this purpose.
The main topics are (in addition to physical assistance systems):
- Ergonomic work design with exoskeletons
- Personalized musculoskeletal modeling
- Digital workplace and process modeling
- Design and evaluation of exo- and endoskeletal structures for preventive ergonomics and medical diagnostics and therapy
- Digital ergonomic shadow (real-time data acquisition and processing for iterative work monitoring)
Contact
Dr.-Ing. Mark Tröster
Phone: +49 173 3840029
E-Mail: mark.troester@iff.uni-stuttgart.de

Study and Education
In teaching, the focus is on teaching topics and methods in the field of physical human-technology interaction. New methodological approaches are to be taught on the basis of student work, internships, and courses.
If you have specific questions about teaching in the field of human-technology interaction, please feel free to contact us.

Are you looking for a bachelor's/master's thesis or a student assistant position in one of the research topics listed above?
Interested students are welcome to contact us specifically about the listed topics or on their own initiative.
Contact: nils.ziegenspeck@iff.uni-stuttgart.de
Projects

Exoworkathlon:
EXOWORKATHLON® develops work-specific courses for industrial exoskeletons to demonstrate and discuss their functions in terms of user feedback, ergonomics, metabolism and production quality. In close cooperation with international partners, a high degree of standardised data collection and processing is being sought.
More information here: https://www.exoworkathlon.de/en/about-exoworkathlon.html
Contact
Mirjam Holl M.Sc.
phone +49 711 970-1480
mail mirjam.holl@iff.uni-stuttgart.de

We integrated shoulder exoskeletons wirelessly into a cloud architecture, allowing their support to be adjusted in real time based on the current situation.
When a disturbance occurs – in the video, this is a ladder acting as an asymmetric obstacle – the system dynamically distributes the assistance optimally between both users to ensure safe and efficient task completion
Kontakt:
Dr.-Ing. Enrique Bances
Telefon +49 711 970-3711
E-Mail
Video ExoLink

- Novel approach for evaluation of intended and unintended effects of exoskeletons.
- Threshold-based biomechanical evaluation of occupational exoskeletons.
- Scientific basis for a new comprehensive tool for industrial ergonomic risk assessment.
- Roadmap for multi-layer and individual ergonomic work design using DHMs.
Human-centred and ergonomic work design is one of the most important drivers for increasing the competitiveness of the European Union. As a flexible, person-specific occupational measure, exoskeletons promise great potential for effectively reducing individual ergonomic stress. Digital human models can provide important insights and offer great potential for systematising the effect and targeted use of exoskeletons, supporting their effective implementation in practice. In this article, digital human models are applied on two levels. Firstly, a realistic industrial logistics scenario in which boxes had to be relocated is designed with the help of a digital human model for workplace and process planning and secondly, a new biomechanical evaluation methodology to analyse intended and unintended effects on internal stress on the human body is demonstrated by applying musculoskeletal exoskeleton human models of four test subjects. Finally, the modelled biomechanical support tendencies of one exoskeleton are preliminary validated using EMG measurement data of the back muscles collected from the four male workers. The preliminary analysis of two back-support exoskeletons to demonstrate the new methodological approach confirms the expected, intended effects in the lower back and reveals unintended effects, such as e.g. changes in knee kinetics when applying a soft or hard-frame exoskeleton. Furthermore, the exemplary results to demonstrate the methodological approach expose notable differences between the test subjects, which underlines the relevance of person-specific evaluation and consideration of exoskeleton support. The preliminary validation shows a correlation between the modelled and the EMG-measured biomechanical exoskeleton support of the considered back muscles.
Journal Article https://www.sciencedirect.com/science/article/pii/S0003687025002078
Contact:
M. Sc. Simon Eckstein
E-Mail

A major challenge for industrial nations is to ensure effective, sustainable, and humane value creation in a society undergoing a demographic change. Occupational exoskeletons promise flexible relief for physically demanding manual activities. They offer opportunities to design attractive and human-centered work. Nevertheless, the preventive effect and the underlying biomechanical characteristics to decrease musculoskeletal complaints and diseases have not yet been sufficiently understood and proven. To support evidence generation, therefore, a contribution to biomechanically assessing and designing occupational exoskeletons using musculoskeletal human models was made as part of this work. The developed model-based approach, embedded in an iterative process model, combines exoskeleton and human dynamics and thus allows application, movement, and exoskeleton characteristics to be examined in one system. In the first application, back-straining activities were examined with a generic exoskeleton model based on sport-physiological and application-oriented movements.
The analysis shows in the lower back´s lumbar compression, metabolism, and a biomechanical strain score characteristically different effectiveness tendencies regarding movement technique, support intensity, and application boundary conditions. In the second application, a shoulder support was designed and optimized for a manual pushing, pulling, and overhead movement based on a detailed application and motion analysis. The shoulder mechanism was adjusted and evaluated with regard to local and global biomechanical strain and shoulder stability. In the final validation of the solution approach, modeled and measured muscle strains and interaction forces in the mechanical exoskeleton-human interface were compared using two approaches. The results show trends towards an agreement between the models for more strained muscle groups and interface modeling with and without mechanical stiffness considerations.
The Doctoral Thesis was funded by PROMISE 4.0.

The vision of the Cluster of Excellence Integrative Computer Aided Architectural Design (IntCDC) is to harness the full potential of digital technologies to rethink design, manufacturing and construction based on integration and interdisciplinarity, with the goal of building groundbreaking innovations in the construction sector since this is only possible through highly integrative basic research in an interdisciplinary large-scale research enterprise. The aim of the cluster is to provide the methodological basis for a thorough rethinking of the design and construction process and the related building systems by choosing an integrative calculation approach based on interdisciplinary research results in the fields of architecture, structural design, building physics, engineering geodesy, manufacturing and systems engineering as well as computer science and robotics, social sciences and humanities. The Institute for Industrial Production and Factory Operation IFF is involved in this cluster with a sub-project headed by Prof. Thomas Bauernhansl. It will investigate how human-machine interaction can be improved in cyber-physical technologies for design and prefabrication, particularly in exoskeletons in conjunction with Augmented Reality Glasses (AR), and what are the technical and social requirements for the successful implementation of these new technologies , Cyber-physical systems in construction make special demands on the handling of the split control between human, machine and sensor data. Therefore, we will examine the future requirements of these technologies in terms of education, skills and digital literacy. We will explore how to technically optimize human-machine interfaces and how to address and overcome non-technical barriers to innovation, such as lack of relevant skills and qualifications, and resulting attitudes of mistrust, reservations, or rejections along with fears of loss of control. The aim is to increase the acceptance of the technology and thus to promote its acceptance in society and at the level of everyday working life. The aim is to present an exoskeleton / AR (prototype, overhead mounting) application prototype in the demonstrator, the testing of which will allow various levels of human control and concept development of digital competence under conditions of joint control for the future development of cyber-physical construction.
https://www.uni-stuttgart.de/universitaet/aktuelles/schaufenster/intcdc-cluster-film/index
Contact
Dr.-Ing. Enrique Bances
E-Mail
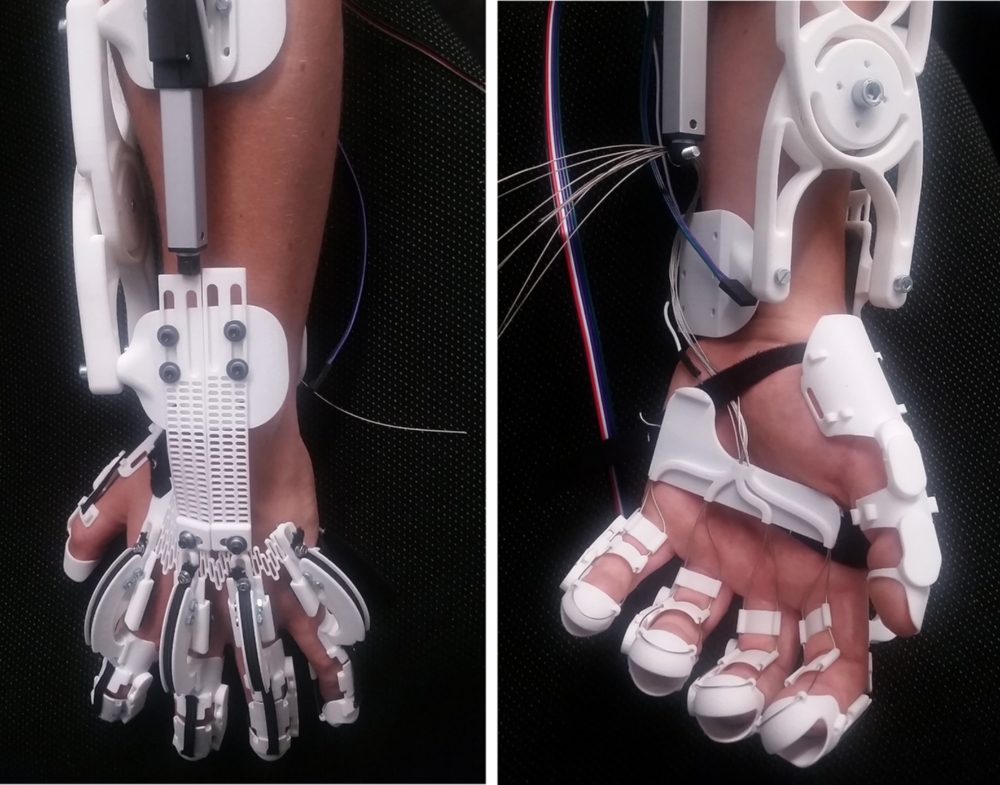
We are developing a non-invasive, neural-controlled hand-exoskeletal system suitable for everyday use that largely compensates for the loss of autonomy and performance due to paralysis of the hand typically occurring after stroke and high cross-sectional injuries. This will be enabled by integrating state-of-the-art EEG-based BMI technology with artificial, context-sensitive, cognitive systems and intelligent bio-robotics.
The project is funded by the Baden-Württemberg-Foundation in the period from 1 March 2017 to 28 February 2020. The project partners are the Eberhard-Karls University of Tübingen, the University of Stuttgart together with Fraunhofer IPA and the Reutlingen University of Applied Sciences.
In Dec 2018 a patent was issued which is being marketed by the Technologie-Lizenz-Büro (TLB) der Baden-Württembergischen Hochschulen. The press release of TLB was met with very good resonance.
Here, the links to some reports and interviews
Focus Gesundheit
Contact
Prof. Dr. med, Urs Schneider
Phone: +49 711 970-3630
E-Mail: urs.schneider@ipa.fraunhofer.de

Cutting meat or pouring a drink from a bottle is crucial for self-determination and autonomy and, thus, for quality of life. Patients with neurodegenerative diseases such as Parkinson's disease, multiple sclerosis, or cerebellar ataxia may not be able to perform such activities of daily living.
While these patients can plan motor actions and their muscle strength is rarely impaired, tremors or overmovements interfere with the intended movements. This happens more and more as the disease progresses, making it increasingly difficult to eat and drink independently. The aim of the iAssistADL project funded by the Baden-Württemberg Foundation (a cooperation between the University of Tübingen and the University of Stuttgart, lasting 04/23 - 03/26) is to develop a non-invasive assistance system that autonomously suppresses dysfunctional movements and at the same time allows intended movements.
The redesigned hardware is controlled by a combination of computational methods to detect user intent, distinguish between unwanted and desired movements, and predict the corrective forces required. The IFF's contribution to the project is mainly the development of an assistance system in the form of a lightweight robotic arm with high mechanical transparency.
Contact
Veronika Hofmann, M. Sc.
Veronika.hofmann@iff.uni-stuttgart.de
With its user-oriented, holistic approach, the iMEDCAP project (22 partners, approx. €25 million, duration: 12/23 – 11/26), funded by the European Defence Fund, aims to revolutionize emergency detection, identification, extraction, treatment, and evacuation of seriously injured and potentially contagious persons in a completely autonomous way. The iMEDCAP solution will include a user-centric scenario that will drive the design and development of autonomous detection of injured persons, the automatic definition of an evacuation and rescue strategy, and an interoperable patient box.
This box will be equipped with diagnostic and intervening devices that can take initial action during transport under remote control. The final result will be the validation of the components and a roadmap for further development, laying the foundation for a modern and digital European rescue system. The IFF's contribution to the project is mainly the development of a drone-based sensor system for detecting injured persons and the contactless collection of information about their vital signs.
More general information is available here:
iMEDCAP-Factsheet_EDF22.pdf (europa.eu)
Contact
Bassam Elmakhzangy, M. Sc.
bassam.elmakhzangy@iff.uni-stuttgart.de

In a time of talent shortages and an ageing workforce, there is an increasing need for a better understanding of physical stress in the workplace in order to better protect workers from musculoskeletal disorders. Occupational exoskeletons in the workplace could be a promising and flexible ergonomic solution to prevent musculoskeletal disorders, but they are not yet sufficiently understood.
The presentation will outline and discuss the results of a modeling study within the research project DigitalExonomics. The AnyBody Modeling SystemTM was used to evaluate the biomechanical effectiveness of existing occupational exoskeletons. For this purpose, motion data was collected in realistic use cases that were digitally planned and set up together with relevant industry stakeholders. Further, a methodological approach for the assessment of intended and unintended effects was developed to investigate the complex biomechanical interaction of exoskeletons with the human musculoskeletal system.
Presented by:
M.Sc. Urban Daub
Senior Expert and Business Segment Manager
Medical Technology and Ergonomics, Fraunhofer IPA
and
Dr.-Ing. Mark Tröster
Research Team Leader and Research Associate
Human Modeling and Ergonomics
University of Stuttgart, IFF and Fraunhofer IPA