Menschmodellierung und Ergonomie
Das Team Menschmodellierung und Ergonomie erforscht die ergonomischen und biomechanischen Zusammenhänge bei der direkten Interaktion des Menschen mit physischen Assistenzsystemen, insbesondere mit Hilfe von digitalen Menschmodellen. Dazu werden physiologische Realdaten am Menschen erhoben und in einer u.a. echtzeitfähigen Dateninfrastruktur verarbeitet. Die dafür notwendigen mensch-zentrierten Methoden werden dazu entwickelt und evaluiert.
Die Themenschwerpunkte sind dabei (ergänzend zu physischen Assistenzsystemen):
- Ergonomische Arbeitsgestaltung mit Exoskeletten
- Personalisierte muskuloskelettale Modellierung
- Digitale Arbeitsplatz- und Prozessmodellierung
- Auslegung und Evaluation exo- und endoskelettaler Strukturen für präventive Ergonomie und medizinische Diagnostik und Therapie
- Digitaler ergonomischer Schatten (Echtzeitdatenerfassung und -verarbeitung zum iterativen Arbeitsmonitoring)
Kontakt
Dr.-Ing. Mark Tröster
Telefon: +49 173 3840029
E-Mail: mark.troester@iff.uni-stuttgart.de

Physische Assistenzsysteme
Das Team Physische Assistenzsysteme erforscht neue Ansätze zur smarten körpergetragenen Assistenz zur Erhaltung, Wiederherstellung oder Steigerung der menschlichen Mobilität. Themenschwerpunkte sind dabei:
- Konzeptionsmethodik und Antriebstechnologien für körpergetragene mechatronische Systeme
- Neuartige Methoden zur Erfassung menschlicher Vitalparameter und Biosignale
- Intuitive Mensch-Technik-Interaktion mit körpergetragener Technologie zur bedarfsgerechten Nutzerunterstützung und -assistenz
- Echtzeitdatenerfassung und -verarbeitung zur direkten Interaktion mit/von physischen Assistenzsystemen (u.a. vernetzte Exoskelette)
Kontakt
Christophe Maufroy, PhD
Telefon: +49 711 970-1167
E-Mail christophe.maufroy@iff.uni-stuttgart.de

Projekte

Eine große Herausforderung für Industrienationen ist die Sicherstellung der effektiven, nachhaltigen und menschgerechten Wertschöpfung in einer Gesellschaft im demographischen Wandel. Arbeitsergonomische Exoskelette versprechen flexible Entlastung bei physisch anspruchsvollen Tätigkeiten. Sie bieten Chancen zur Gestaltung attraktiver und menschzentrierter Arbeit. Dennoch ist die präventive Wirkung und deren zugrundeliegenden biomechanischen Wirkmechanismen zur Reduktion von muskuloskelettalen Beschwerden noch nicht hinreichend verstanden. Diese Arbeit leistet deshalb einen Beitrag zur biomechanischen Einordnung und Auslegung unter Verwendung von muskuloskelettalen Menschmodellen. Der entwickelte modellbasierte Lösungsansatz, eingebettet in einem iterativen Vorgehensmodell, kombiniert Exoskelett- und Menschdynamik und erlaubt damit, Anwendungs-, Bewegungs- und Exoskelett-Charakteristika in einem System zu untersuchen. In der ersten Anwendung wurden den Rücken beanspruchende Tätigkeiten mit einem generischen Exoskelett-Modell anhand sportphysiologischer und anwendungsorientierter Bewegungen untersucht. Die Analyse zeigt in der Lumbalkompression, Metabolik und einem biomechanischen Beanspruchungsscore des unteren Rückens sich charakteristisch unterscheidende Wirksamkeitstendenzen beeinflusst durch Bewegungstechnik, Unterstützungsintensität und Anwendungsrandbedingungen. In der zweiten Anwendung wurde in einer Anwendungs- und Bewegungsanalyse eine Schulterunterstützung auf eine manuelle Schub-, Zug- und Überkopfbewegung ausgelegt und verbessert. Dabei wurde der Schultermechanismus hinsichtlich lokaler und globaler biomechanischer Beanspruchung und Schulterstabilität angepasst und eingeordnet. In der abschließenden Validierung des Lösungsansatzes wurden anhand zweier Ansätze modellierte und gemessene Muskelbeanspruchungen und Interaktionskräfte in der mechanischen Exoskelett-Mensch-Schnittstelle verglichen. Die Ergebnisse zeigen im Trend eine Übereinstimmung der Modelle für höher beanspruchte Muskelpartien und Schnittstellenmodellierung mit und ohne Berücksichtigung von mechanischen Schnittstellensteifigkeiten.
Die wissenschaftliche Doktorarbeit erfolgte maßgeblich finanziert durch das Landesgraduiertenkolleg PROMISE 4.0.
Kontakt:
Dr.-Ing. Mark Tröster
Tel.:++49 173 3840029
E-Mail
Das IFF bearbeitet ein Teilprojekt des Clusters of Exellence Integrative Computational Design and Construction for Architecture (IntCDC).
Die Vision des Exzellenzclusters besteht darin, das volle Potenzial digitaler Technologien zu nutzen, um Design, Fertigung und Konstruktion auf der Grundlage von Integration und Interdisziplinarität zu überdenken. Es sollen so bahnbrechende Innovationen im Bausektor ermöglicht werden, dienur durch hochintegrative Grundlagenforschung in einem interdisziplinären Großforschungsunternehmen möglich sind. Ziel ist es, die methodischen Grundlagen für ein tiefgreifendes Überdenken des Entwurfs- und Bauprozesses und der damit verbundenen Bausysteme zu schaffen, indem ein integrativer Berechnungsansatz gewählt wird, der auf interdisziplinären Forschungsergebnissen aus den Bereichen Architektur, Tragwerksplanung, Bauphysik, Ingenieurgeodäsie, Fertigungs- und Systemtechnik sowie Informatik und Robotik, Sozial- und Geisteswissenschaften basiert.
Das Institut für Industrielle Fertigung und Fabrikbetrieb IFF ist in diesem Cluster mit einem Teilprojekt unter der Leitung von Prof. Thomas Bauernhansl beteiligt.
Es wird untersucht, wie die Mensch-Maschine-Interaktion in cyberphysischen Technologien für Konstruktion und Vorfertigung, insbesondere bei Exoskeletten im Zusammenspiel mit Augmented-Reality-Brillen (AR), verbessert werden kann und welche technischen und sozialen Anforderungen für die erfolgreiche Implementierung dieser neuen Technologien bestehen.
Cyber-physische Systeme in der Konstruktion stellen besondere Anforderungen an den Umgang mit der aufgeteilten Kontrolle zwischen Mensch, Maschine und Sensordaten. Daher werden wir die zukünftigen Anforderungen dieser Technologien in Bezug auf Ausbildung, Fähigkeiten und digitale Kompetenz untersuchen. Wir werden erforschen, wie Mensch-Maschine-Schnittstellen technisch optimiert werden können und wie nichttechnische Innovationsbarrieren, wie Mangel an relevanten Fähigkeiten und Qualifikationen und daraus resultierende Einstellungen von Misstrauen, Vorbehalten oder Ablehnung zusammen mit Ängsten über einen möglichen Kontrollverlust, angesprochen und überwunden werden können. Ziel ist es, die Akzeptanz der Technologie in der Gesellschaft und auf der Ebene des Arbeitsalltags zu fördern. Es soll der Anwendungsprototyp eines Exoskeletts / AR (Positionierung, Überkopfmontage) im Demonstrator präsentiert werden, dessen Erprobung verschiedene Grade menschlicher Kontrolle und die Konzeptentwicklung digitaler Kompetenz unter Bedingungen gemeinsamer Kontrolle für die zukünftige Entwicklung der cyber-physischen Konstruktion ermöglicht.
Meldung der Universität Stuttgart
Web-Site des Clusters IntCDC
Kontakt
Dr.-Ing. Nelson Enrique Bances Purizaca
E-Mail: ![]() nelson.enrique.bances.purizaca@ipa-extern.fraunhofer.de
nelson.enrique.bances.purizaca@ipa-extern.fraunhofer.de
Telefon: +49 711 970-3711
https://www.uni-stuttgart.de/universitaet/aktuelles/schaufenster/intcdc-cluster-film/index
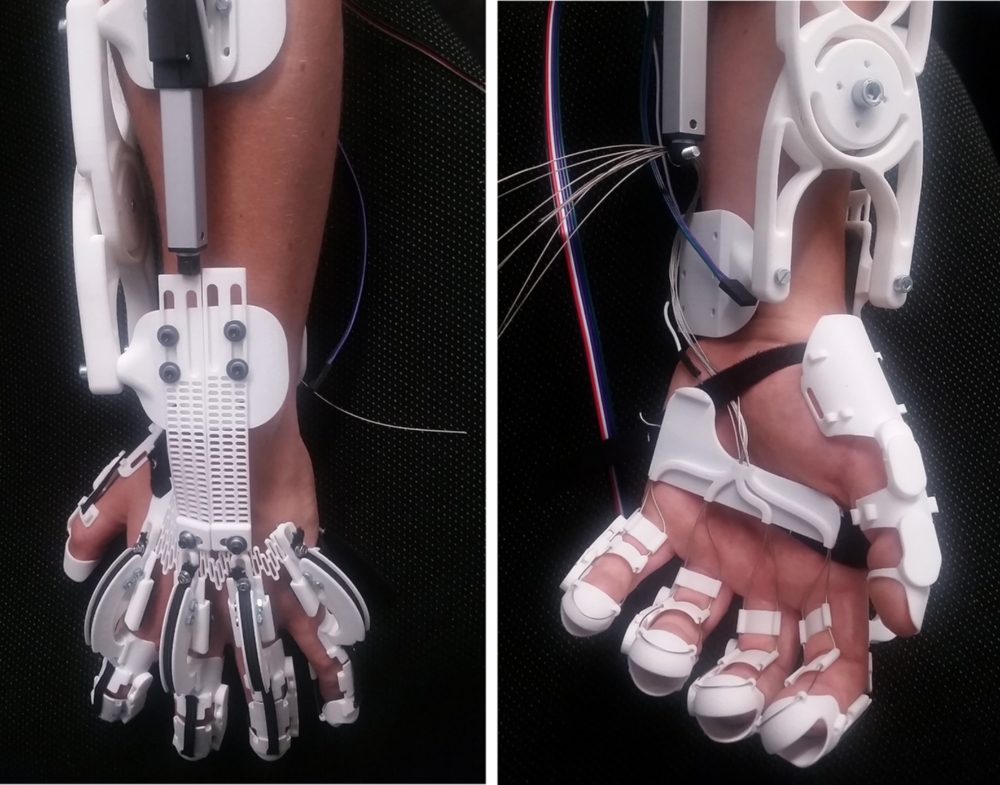
Wir entwickeln ein nicht-invasives und alltagstaugliches neuralgesteuertes Hand-Exoskelett-System , das den Verlust von Autonomie und Leistungsfähigkeit durch Lähmungen der Hand, wie sie typischerweise nach Schlaganfall und hohen Querschnittsverletzungen auftreten, weitgehend ausgleicht. Dies soll durch Integration modernster EEG-basierter BMI-Technologie mit künstlichen, kontext-sensitiven, kognitiven Systemen und intelligenter Bio-Robotik ermöglicht werden.
Das Projekt wird im Zeitraum vom 01. März 2017 bis 28. Februar 2020 durch die Baden-Württemberg-Stiftung gefördert. Projektpartner sind die die Eberhard-Karls Universität Tübingen, die Universität Stuttgart zusammen mit dem Fraunhofer IPA sowie die Hochschule Reutlingen.
Ende 2018 wurde ein Patent angemeldet, das vom Technologie-Lizenz-Büro (TLB) der Baden-Württembergischen Hochschulen vermarktet wird. Die Pressemitteilung des TLB fand sehr gute Resonanz.
Hier einige der Berichte und Interviews
Elektronikpraxis
Focus Gesundheit
Dr. med, Urs Schneider
Abteilungsleitung
Telefon: +49 711 970-3630
E-Mail: urs.schneider@ipa.fraunhofer.de

Das Schneiden von Fleisch oder das Einschenken aus einer Flasche während des Essens ist entscheidend für Selbstbestimmung und Autonomie und somit für die Lebensqualität. Patienten mit neurodegenerativen Erkrankungen wie Parkinson, Multipler Sklerose oder zerebellärer Ataxie sind möglicherweise nicht in der Lage, solche Aktivitäten des täglichen Lebens auszuführen. Während diese Patienten in der Lage sind, motorische Aktionen zu planen und ihre Muskelkraft selten beeinträchtigt ist, stören Zittern oder Überbewegungen die beabsichtigten Bewegungen. Dies geschieht im Verlauf der Erkrankung zunehmend, sodass unabhängiges Essen und Trinken immer schwieriger werden. Das Ziel des von der Baden-Württemberg Stiftung geförderten Projekts iAssistADL (Zusammenarbeit zwischen die Universität Tübingen und die Universität Stuttgart, Laufzeit 04/23 - 03/26) ist es, zum ersten Mal ein nicht-invasives Assistenzsystem zu entwickeln, das dysfunktionale Bewegungen autonom unterdrückt und gleichzeitig beabsichtigte Bewegungen zulässt. Die neu gestaltete Hardware wird durch eine Kombination von rechnergestützten Methoden gesteuert, um die Benutzerintention zu erkennen, zwischen unerwünschten und gewünschten Bewegungen zu unterscheiden und die erforderlichen Korrekturkräfte vorherzusagen. Der Beitrag des IFF im Projekt besteht hauptsächlich in der Entwicklung eines Assistenzsystems in Form eines Leichtbau-Roboterarms mit hoher mechanischer Transparenz.
Mit ihrem benutzerorientierten, ganzheitlichen Ansatz zielt das vom European Defence Fund geförderte Projekt iMEDCAP (22 Partner, ca. 25 Mio. €, Laufzeit: 12/23 – 11/26) darauf ab, die Notfallerkennung, -identifikation, -extraktion, -behandlung und -evakuierung schwer verletzter und möglicherweise ansteckender Personen auf völlig autonome Weise zu revolutionieren. Die iMEDCAP-Lösung wird ein benutzerorientiertes Szenario umfassen, das das Design und die Entwicklung der autonomen Erkennung verletzter Personen, die automatische Definition einer Evakuierungs- und Rettungsstrategie sowie einer interoperablen Patientenbox vorantreibt. Diese Box wird mit diagnostischen und intervenierenden Geräten ausgestattet sein, die während des Transports unter Fernsteuerung erste Maßnahmen ergreifen können. Das endgültige Ergebnis wird die Validierung der Komponenten und ein Fahrplan für die weitere Entwicklung sein, der die Grundlage für ein modernes und digitales europäisches Rettungssystem legt. Der Beitrag des IFF im Projekt besteht hauptsächlich in der Entwicklung eines drohnenbasierten Sensorsystems zur Erkennung von Verletzten und zur kontaktlosen Erfassung von Informationen über ihre Vitalzeichen.
Weitere allgemeine Informationen sind hier verfügbar: iMEDCAP-Factsheet_EDF22.pdf (europa.eu)

In Zeiten des Fachkräftemangels und der alternden Erwerbsbevölkerung entsteht ein zunehmender Bedarf an ergonomischer Arbeitsgestaltung, um die Arbeitnehmer besser vor Muskel-Skelett-Erkrankungen zu schützen. Exoskelette am Arbeitsplatz könnten eine vielversprechende und flexible ergonomische Lösung sein, um Muskel-Skelett-Erkrankungen vorzubeugen, sind aber noch nicht ausreichend erforscht.
In diesem Vortrag werden die Ergebnisse einer muskuloskelettalen Modellierungsstudie vorgestellt und diskutiert. Dazu wurden Bewegungsdaten in realitätsnahen Anwendungsfällen erhoben, die gemeinsam mit relevanten Industrievertretern digital geplant und aufgesetzt wurden. Darüber hinaus wurde ein methodischer Ansatz zur Bewertung beabsichtigter und unbeabsichtigter Effekte entwickelt, um die komplexe biomechanische Interaktion von Exoskeletten mit dem menschlichen Bewegungsapparat zu untersuchen.
ONLINE-LINK
Vorgestellt von:
M.Sc. Urban Daub
Senior Expert und Business Segment Manager
Medizintechnik und Ergonomie
Fraunhofer IPA
und
Dr.-Ing. Mark Tröster
Forschungsteamleiter und wissenschaftlicher Mitarbeiter
Menschmodellierung und Ergonomie
Universität Stuttgart, IFF und Fraunhofer IPA
WEBINARLINK Muskuloskelettales Exoskelett-Assessment mit der biomechanischen Body Heatmap
- Exoworkathlon: EXOWORKATHLON® entwickelt arbeitsspezifische Parcours für industrielle Exoskelette, um deren Funktionen im Hinblick auf Benutzerfeedback, Ergonomie, Metabolik und Produktionsqualität zu demonstrieren und zu diskutieren. In enger Zusammenarbeit mit internationalen Partnern wird ein hohes Maß an standardisierter Datenerhebung und -verarbeitung angestrebt.
Weitere Infos hier: https://www.exoworkathlon.de/en/about-exoworkathlon.html
Lehre
In der Lehre liegt der Fokus auf der Vermittlung von Themen und Methoden im Bereich der physischen Mensch-Technik-Interaktion. Dabei sollen neuen methodische Ansätze anhand von studentischen Arbeiten, Praktika und Lehrveranstaltungen vermittelt werden.
Bei spezifischen Fragen zur Lehre im Bereich der Mensch-Technik-Interaktion kommen Sie gern auf uns zu:
Kontakt:
Dr.-Ing. Mark Tröster
Tel: +49 711 970-1789
E-Mail

Suchen Sie eine Bachelor-/Masterarbeit oder eine HiWi-Stelle im Bereich eines der oben aufgeführten Forschungsthemen? Interessierte Studierende können sich gerne konkret zu den gelisteten Themenstellungen oder initiativ an uns wenden.

Rund ein Viertel aller Erwerbstätigen in Deutschland verlassen oder wechseln ihren Beruf aufgrund von Überbelastung des Muskel-Skelett-Apparats. Sowohl die ergonomische Planung, Auslegung und Optimierung der Arbeitsplätze als auch die Forschung an Unterstützungsmöglichkeiten der Arbeitskräfte haben hierbei direkten präventiven Einfluss. Der Forschungsbereich Mensch-Technik-Interaktion des Instituts für industrielle Fertigung und Fabrikbetrieb IFF der Universität Stuttgart und das Fraunhofer IPA Stuttgart befassen sich daher mit ergonomisch entlastenden und unterstützenden Exoskeletten. Für die Evaluation in einer standardisierten Testumgebung, wurde die prospektive Studie Exoworkathlon® entwickelt, in denen die Systeme in sogenannten Parcours realitätsnah und standardisiert getestet werden können [1,2]. Eine Bewertung dieser körpergetragenen physischen Assistenzsysteme ist aufgrund der hohen Individualität von Mensch und Arbeitsplatz umfassend und komplex. Neben konventionellen experimentellen Methoden und der subjektiven Bewertung des Nutzers, werden im Rahmen von Industrie 4.0 auch immer häufiger digitale Menschmodelle [3] als Werkzeug für ergonomischen Analysen herangezogen.
Studentische Arbeiten zu dieser Thematik beinhalten einen oder mehrere der nachfolgenden Aspekte im Rahmen des Exoworkathlon® Formates:
- Digitalisierung bestehender Parcours in der Software ema Work Designer
(imk Industrial Intelligence GmbH, Chemnitz, Deutschland) [4] - Planung und Konzeption eines neuen Parcours
- Durchführung (digitaler) ergonomischer Analysen und Interpretation der Ergebnisse
- Berücksichtigung von Automatisierungslösungen in ganzheitlicher Ergonomiebetrachtung
(FTS, Robotische Handhabungsgeräte, etc.) - Methodische und digitale Arbeitsplatz und -prozess Optimierung nach dem TOP-Prinzip und VDI 2221
Notwendig für die Arbeit sind Vorkenntnisse im Bereich Anatomie und Ergonomie. Wünschenswert sind Erfahrung und/oder großes Interesse an Exoskeletten, CAD-Konstruktion und Biomechanik. Beginn einer Arbeit ist direkt möglich.
Bewerbungen richten Sie bitte an:
Simon Eckstein, M.Sc.
Fraunhofer IPA
Gesundheitstechnologien und -prozesse |
In-silico Human Modeling
Tel.: 0711 970-3529
Mail: simon.eckstein@ipa.fraunhofer.de

Wir suchen eine Wissenschaftliche Hilfskraft (m/w/d) aus dem Bereich Medizintechnik oder Maschinenbau, für die Konzeption und Implementierung von mechanischen Komponenten zur Optimierung eines Leichtbau-Roboterarms zur Korrektur von Bewegungsstörungen bei Patient:innen mit neurodegenerativen Erkrankungen.
Kontext:
Patient:innen mit neurodegenerativen Erkrankungen wie Parkinson, Multipler Sklerose oder zerebellärer Ataxie sind möglicherweise nicht in der Lage, einfache alltägliche Aktivitäten, wie das Essen, selbstständig auszuführen. Obwohl diese Patient:innen motorische Aktionen planen können und ihre Muskelkraft in der Regel nicht beeinträchtigt ist, stören Zittern oder überschießende Bewegungen die beabsichtigten Trajektorien. Im Rahmen des Projekts iAssistADL wird ein nicht-invasives Assistenzsystem entwickelt, das dysfunktionale Bewegungen autonom unterdrückt und gleichzeitig beabsichtigte Bewegungen zulässt. Die neu gestaltete Hardware wird durch eine Kombination rechnergestützter Methoden gesteuert, um die Userintention zu erkennen, zwischen unerwünschten und gewünschten Bewegungen zu unterscheiden und die erforderlichen Korrekturkräfte vorherzusagen. Der Beitrag des Instituts für Industrielle Fertigung und Fabrikbetrieb (IFF) im Projekt besteht hauptsächlich in der Entwicklung eines Assistenzsystems in Form eines Leichtbau-Roboterarms mit hoher mechanischer Transparenz.
Arbeitsbeschreibung:
Der aktuelle Prototyp des Assistenzsystems bietet verschiedene Verbesserungspotenziale hinsichtlich der Funktion und der Sicherheit, um Tests mit Proband:innen zu ermöglichen. Konzeption, sowie die Ausarbeitung mittels CAD und die Umsetzung durch rapid prototyping, wie 3D-Druck, und darauffolgend die Montage und Testung am Gesamtsystem sind Kernbereiche dieses Arbeitspaketes. Beispiele für konkrete Anpassungsmaßnahmen sind zum einen komplexe Gehäuse und Abschirmmechanismen bei beweglichen Teilen, die Optimierung der Armsegmente hinsichtlich leichtbaulicher Prinzipien oder die Anpassung der Unterarmschnittstelle zur Etablierung des Kontakts mit den Nutzenden.
Kernaufgaben:
- Konzeption verschiedener mechanischer Verbesserungspotenziale hinsichtlich Funktion und Sicherheit
- Ausarbeitung mittels CAD und Umsetzung mittels verschiedener Fertigungsverfahren
- Aufbau und Evaluation der Hardware am realen Prototypen
Voraussetzungen:
- Student:in der Medizintechnik, Maschinenbau oder eines verwandten Fachgebiets
- CAD-Kenntnisse, insbesondere SolidWorks
- Erfahrung mit rapid prototyping, insb. 3D-Druck ist von Vorteil
- Freude am handwerklichen Aufbau der Hardware-Komponenten
- Motivation zur eigenständigen Arbeit an der Weiterentwicklung des Assistenzsystems
Kontakt:
Veronika Hofmann M.Sc. Wissenschaftliche Mitarbeiterin
Universität Stuttgart, Institut für Industrielle Fertigung und Fabrikbetrieb (IFF)
Forschungsbereich Mensch-Technik-Interaktion
Forschungsteam Physische Assistenzsysteme
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Bereich Gesundheitstechnologien
Forschungsteam Physische Assistenzsysteme Engineering
Nobelstraße 12 │ 70569 Stuttgart
Telefon +49 711 970-3510
veronika.hofmann@iff.uni-stuttgart.de
veronika.hofmann@ipa.fraunhofer.de
Wir suchen eine Wissenschaftliche Hilfskraft (m/w/d) aus den bereichen Kybernetik, Mechatronik, Informatik für die Arbeiten zur Konzeption und Implementierung einer Kraftregelung für einen Leichtbau-Roboterarm zur Korrektur von Bewegungsstörungen bei Patient:innen mit neurodegenerativen Erkrankungen
Patient:innen mit neurodegenerativen Erkrankungen wie Parkinson, Multipler Sklerose oder zerebellärer Ataxie sind möglicherweise nicht in der Lage, einfache alltägliche Aktivitäten, wie das Essen, selbstständig auszuführen. Obwohl diese Patient:innen motorische Aktionen planen können und ihre Muskelkraft in der Regel nicht beeinträchtigt ist, stören Zittern oder überschießende Bewegungen die beabsichtigten Trajektorien. Im Rahmen des Projekts iAssistADL wird ein nicht-invasives Assistenzsystem entwickelt, das dysfunktionale Bewegungen autonom unterdrückt und gleichzeitig beabsichtigte Bewegungen zulässt. Die neu gestaltete Hardware wird durch eine Kombination rechnergestützter Methoden gesteuert, um die Userintention zu erkennen, zwischen unerwünschten und gewünschten Bewegungen zu unterscheiden und die erforderlichen Korrekturkräfte vorherzusagen. Der Beitrag des Instituts für Industrielle Fertigung und Fabrikbetrieb (IFF) im Projekt besteht hauptsächlich in der Entwicklung eines Assistenzsystems in Form eines Leichtbau-Roboterarms mit hoher mechanischer Transparenz.
Arbeitsbeschreibung:
Der Leichtbau-Roboterarm muss zur Kompensation der Störbewegungen kleine Korrekturkräfte am Patientenarm über eine Unterarmschnittstelle anbringen. Das ultimative Ziel der Arbeiten ist die Implementierung eines Reglers zur genauen Regelung der angebrachten Kräfte. Die Konzeption des Reglers erfolgt zunächst simulativ, wird anschließend mittels eines Rapid Control Prototype Systems getestet und abschließend auf einem eingebetteten System implementiert und evaluiert.
Kernaufgaben:
- Anpassung und Parameteridentifikation eines bestehenden Modells des Roboterarms (Matlab/Simulink)
- Konzeption und Implementierung des Kraftreglers mit dSpace
- Implementierung des Reglers auf vorhandener Hardware und Evaluation
Voraussetzungen:
- Student:in der Kybernetik, Mechatronik, Informatik oder eines verwandten Fachgebiets
- Umfassende Kenntnisse im Bereich Regelungstechnik und/oder Robotik
- Erfahrung mit MATLAB/Simulink
- Programmierkenntnisse, idealerweise in C/C++
- Erfahrung mit dSpace ist von Vorteil
- Motivation, theoretische Ansätze in der Praxis zu implementieren und an realer Hardware zu arbeiten
Kontakt:
Veronika Hofmann M.Sc. Wissenschaftliche Mitarbeiterin
Universität Stuttgart, Institut für Industrielle Fertigung und Fabrikbetrieb (IFF)
Forschungsbereich Mensch-Technik-Interaktion
Forschungsteam Physische Assistenzsysteme
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Bereich Gesundheitstechnologien
Forschungsteam Physische Assistenzsysteme Engineering
Nobelstraße 12 │ 70569 Stuttgart
Telefon +49 711 970-3510
veronika.hofmann@iff.uni-stuttgart.de
veronika.hofmann@ipa.fraunhofer.de

Urs Schneider
Dr. med.Leiter des Forschungsbereichs Mensch-Technik-Interaktion