
Forschungsthemen
In der Abteilung "Kognitive Produktionssysteme" konzentrieren wir uns darauf, fortschrittliche Steuerungs- und Vorhersagealgorithmen zu entwickeln und anzuwenden, um Probleme im Zusammenhang mit Robustheit und Zuverlässigkeit in Produktionssystemen anzugehen. Gleichzeitig stellen wir sicher, dass das gesamte System flexibel bleibt und sich an Prozessänderungen anpassen kann. Um die Robustheit, Zuverlässigkeit und Flexibilität gleichzeitig zu verbessern, setzen wir Methoden des maschinellen Lernens und der künstlichen Intelligenz ein, einschließlich dem verstärkenden Lernen, mehrschichtigen Perzeptronen und anderem.
Die Forschungsthemen des Bereichs sind im Einzelnen:
- Entwicklung und Anwendung von Verfahren des maschinellen Lernens im industriellen Umfeld
- Architekturen und Algorithmen für die kognitive Robotik und Automatisierungstechnik
- Integration cyber-physischer und kognitiver Produktionsmittel in vernetzten Wertschöpfungssystemen
- Sicherer, zuverlässiger und nachvollziehbarer Einsatz von künstlicher Intelligenz in der Produktion
- Theory-Guided Data Science für Prognose und Gesundheitsmanagement
- Physics-Informed maschinelles Lernen und Data-Efficient künstliche Intelligenz in der Produktion

Vision:
Im Vorhaben DigiAutoFab wird das Ziel verfolgt, die gesamte Prozesskette für additiv gefertigte Kunststoffbauteile mit dem Pulverbettschmelzverfahren mit Lasern (PBF-LB/P) durchgehend zu digitalisieren - von der Konstruktion über die Fertigungsvorbereitung über die Fertigung, bis zu den nachgelagerten Prozessen.
Zielsetzung:
Durch die Digitalisierung soll eine durchgängige Rückverfolgbarkeit von Bauteilen und der gezielte Aufbau von Prozesswissen erreicht werden, um mit Ansätzen des maschinellen Lernens Verarbeitungsparameter schnell zu optimieren und die Reproduzierbarkeit und Übertragbarkeit zwischen Anlagen zu verbessern. Auf diese Weise kann die Nutzung additiver Fertigungsverfahren im Automobilbau für die Fertigung von Vorserien- und Ersatzteilen ermöglicht werden.
Durch den Aufbau eines digitalen Zwillings können effiziente Design-Auslegungsworkflows entwickelt und Methoden des maschinellen Lernens genutzt werden, um mit einem robusten und effizienten Gesamtprozess die Additive Fertigung funktionaler Bauteile in den Anwendungsszenarien möglich zu machen. Diese neuen Fähigkeiten erlauben dann die Verwendung derzeit schwer zu verarbeitender, wirtschaftlich aber attraktiveren Werkstoffe und die Verarbeitung von recyceltem Material. Sie tragen somit zur Kostensenkung und Nachhaltigkeit der additiven Fertigung bei.
Die einzelnen Komponenten, Methoden, Schnittstellen und Algorithmen werden dabei entlang von zwei Use-Cases entwickelt, die am Ende des Projektes auch in einer Technologiedemonstration verwendet werden und der Ableitung von Geschäftsmodellen dienen, mit denen die beschriebenen Anwendungsszenarien bedient werden können.
Die Use Cases sind folgende:
- Spritzguss-äquivalente Vorserienteile
- Spritzguss-äquivalente Ersatzteile
Die abschließende Verwertungsstrategie von DigiAutoFab stützt sich auf vier miteinander verbundene Aktivitäten:
- Entwicklung der wichtigsten verwertbaren Ergebnisse (Key Exploitable Results, KER)
- Ausarbeitung und Verfeinerung von Verwertungswegen, einschließlich der Entwicklung von Strategien zum Schutz der Rechte des geistigen Eigentums und des Wissens sowie eine fortlaufende Analyse der Marktlandschaft
- Überbrückung der Projektendresultate mit möglichen kommerziellen Anwendungen und Roadmapping für langfristige Auswirkungen nach dem Projektabschluss
- Parallel die Möglichkeit kooperativer Geschäftsmodelle: Die im Projekt entwickelten Digitalisierungslösungen fortlaufend geprüft, ob Geschäftsmodelle über Unternehmensgrenzen hinweg ermöglicht werden können
Die produzierende Industrie und ihre Kunden legen zunehmend Wert auf hohe Qualitätsstandards. Anstelle der manuellen Qualitätsprüfung, die ineffizient und fehleranfällig sein kann, setzen einige Branchen verstärkt auf automatisierte Prüfungen, z.B. mithilfe von Methoden des maschinellen Lernens (ML). Es fehlen jedoch immer noch geeignete Standards und Entwicklungsmethoden, um die Eignung und Qualifizierung eines ML-basierten KI-Systems nachzuweisen. So verhindern Bedenken hinsichtlich der Zuverlässigkeit oder Genauigkeit der auf ML basierenden KI-Systeme bisher deren breiten industriellen Einsatz.
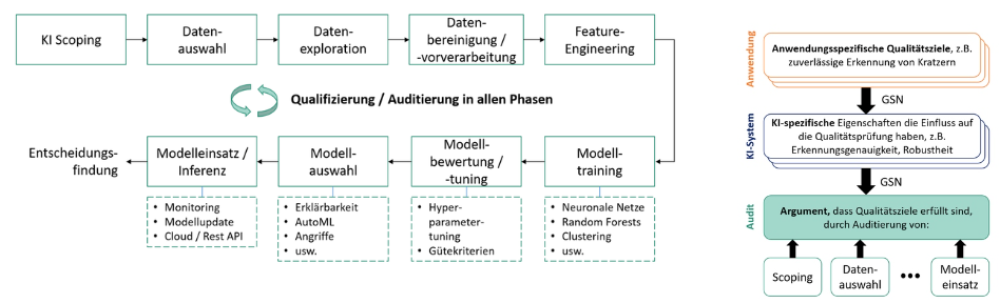
Ziel des Projekts ist die Entwicklung eines Software-Frameworks für die Qualifizierung bzw. Auditierung von ML-basierten KI-Systemen in der industriellen Qualitätsprüfung. Das Framework besteht dabei aus einem Vorgehensmodell samt softwaregestützter Methoden und Werkzeuge, die es ermöglichen (a) Prüf- und Bewertungskriterien zu ermitteln und zu formulieren sowie (b) das KI-System entlang dieser Kriterien abzunehmen. Das Framework soll modular gestaltet sein, sodass eine einfache Integration und Erweiterung von Prüf- bzw. Auditierungsmodulen möglich wird. Das Framework soll insbesondere kleine und mittelständische Unternehmen (KMU) dazu befähigen, fremdbezogene KI-Systeme zu qualifizieren, um so auch ohne eigene KI-Fachkräfte die Leistungsfähigkeit bewerten zu können. Das Framework soll auch für KI-Dienstleister zur Selbstauskunft oder für unabhängige Prüfinstanzen zur Zertifizierung einsetzbar sein.
In diesem Vorhaben wird für die verschiedenen Entwicklungsphasen eines KI-Systems eine systematische Ermittlung und Formulierung von anwendungs- und KI-spezifischen Prüf- und Bewertungskriterien vorgeschlagen, basierend auf sogenannten Argumentationsstrukturen. Kernelement der Argumentationsstruktur ist das Hauptziel, welches durch das KI-System zu erreichen ist , etwa, dass eine bestimmte Pseudofehlerrate nicht unterschritten wird. Zur weiteren Strukturierung kann dieses Hauptziel in Unterziele oder zu erfüllende Kriterien aufgegliedert werden. Zudem sind alle getroffenen Annahmen und Kontextinformationen in die Argumentationsstruktur zu integrieren. Um ein strukturiertes Argument zur Erfüllung des Hauptziels bereitstellen zu können, erfasst die Argumentationsstruktur auch die dafür erforderlichen und zu erbringenden system- oder prozessbezogenen Nachweise. Die Argumentationsstruktur soll bei der Auditierung des KI-Systems entlang der verschiedenen Entwicklungsphasen herangezogen werden. Daher soll in diesem Vorhaben ein computergestütztes Assistenzsystem als Bestandteil des Software-Frameworks zur unterstützenden Erstellung von Argumentationsstrukturen entwickelt werden, welches sich auf vorgefertigten, dem Anwendungskontext der Qualitätsprüfungen entsprechenden Templates stützt und die erstellte Argumentationsstruktur zentral verwaltet. Hierfür soll eine computergestützte Auditierungsplattform entwickelt werden.
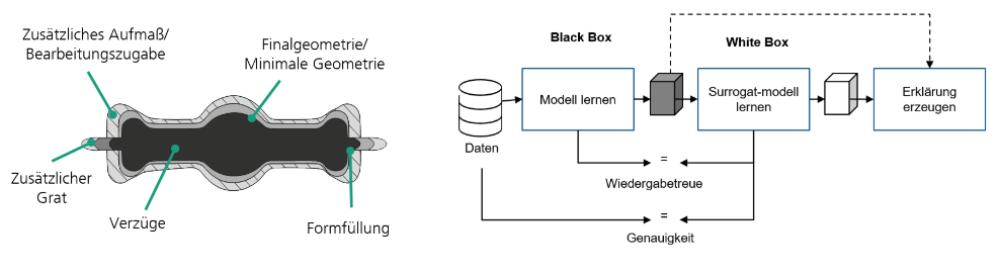
Prozesse der Warmmassivumformung unterliegen vielen Größen und Randbedingungen. Der Schmiedevorgang ist dabei empfindlich gegenüber wechselwirkenden Prozessschwankungen oder eine instabile Prozessführung. So kommt es vor allem bei Schwankungen bei den Einlegetemperaturen oder beim Aufbringen des Schmierstoffs zur Unterfüllung und das Bauteil wird als Ausschuss bewertet. Massenzugabe sorgen beim Gesenkschmieden für einen stabileren Prozess. Dabei entstehen Grate, die später mit viel Energieaufwand entfernt werden müssen und zusätzlichen Materialaufwand erfordern. Die Prozessstabilisierung durch eine Gratausformung wirkt sich somit negativ auf den Material- und Energiebedarf aus. Viele Geometrien sind zudem anfällig gegenüber Verzügen, die außerhalb der zulässigen Toleranz weitere Nachbearbeitungen erfordern. So beeinflussen Schwankungen in den Prozessparametern und unbekannte Wechselwirkungen die Qualität der Teile.
Das Ziel des Forschungsvorhabens besteht in der Verbesserung von Qualitätsmerkmalen im Gesenkschmiedeprozess durch ein besseres Verständnis der Wechselwirkungen. Dabei sollen datenbasierte Modelle in Kombination mit globalen Erklärbarkeitsverfahren helfen, bislang unverstandene Korrelationen und Prozessschwankungen zu identifizieren. Damit können Ansätze entwickelt werden, die durch ein angepasstes Wirkflächendesign auch mit geringeren Sicherheitsfaktoren wie Grat oder Aufmaße eine Prozessstabilisierung erlauben. Um dies zu erreichen, wird zunächst das Domänenwissen gesammelt und kondensiert, Bauteilqualitätsdaten und Prozessdaten werden automatisiert generiert, um Referenzdatensätze zu erzeugt. Anhand dieser Daten wird ein maschinelles Lernverfahren entwickelt, das anhand von Prozessdaten Vorhersagen über Qualitätsmerkmale treffen kann. Schließlich wird ein White-Box-Modell zur Identifikation von Prozessgrößen entwickelt, die die Bauteilqualität beeinflussen. Damit soll in Zukunft das Wirkflächendesign für den vorliegenden Prozess optimiert werden und die Übertragbarkeit auf andere Gesenkschmiedeprozesse erreicht werden.
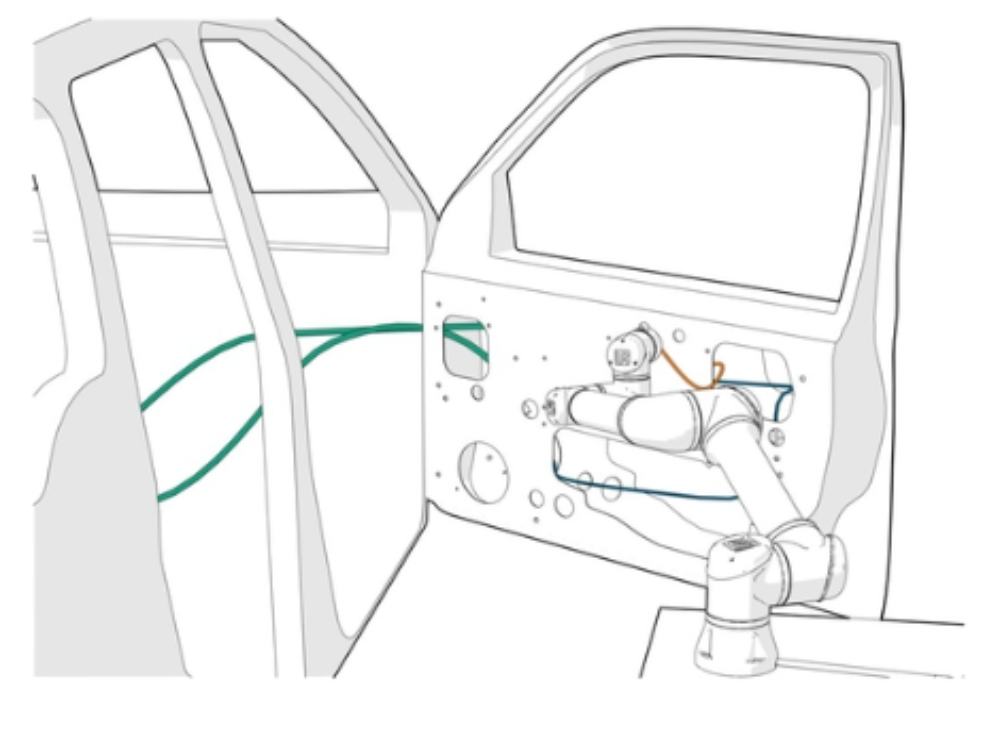
Biegeschlaffe Bauteile wie Kabel und Kabelbäume haben bei der Produktion von Elektrofahrzeugen eine zentrale Rolle. Sie sind aber mangels robuster Prozesse bislang nicht automatisiert handhabbar. Im Projekt "RoboCable" werden daher neuartige KI-Methoden für die robotergestützte Handhabung bzw. Manipulation biegeschlaffer Bauteile erforscht.
Im Projekt wird eine Kombination folgender Technologien betrachtet:
- Lageschätzung filigraner biegeschlaffer Bauteile mittels optischer Sensoren
- modellbasiertes Matching von Sensordaten und digitalem Bauteilmodell
- skillbasierte Roboterprogrammierung zur Umsetzung komplexer und kraftgeregelter Bewegungen
- KI-basierte Auswahl und Parametrierung geeigneter Roboterskills
- Reinforcement Learning für die Robotersteuerung
- Einsatz einer Physik-Simulationsumgebung als Digitaler Zwilling der Produktion
Durch diese Kombination erlernt der Roboter neue Montagetätigkeiten virtuell in der Simulationsumgebung, um den hohen Varianzen biegeschlaffer Bauteile und inhärenten Prozessunsicherheiten Rechnung zu tragen. Laufende Aufgaben können parallel dazu unterbrechungsfrei ausgeführt werden. Im Sinne einer VISION ZERO werden Programmier-, Stillstands- und Anlaufzeiten sowie Defekte minimiert.
Das Projekt ist am 01.Januar 2023 im Rahmen des InnovationsCampus Mobilität der Zukunft ICM gestartet.
Universität Stuttgart: Institut für Steuerungstechnik der Werkzeugmaschinen und Fertigungseinrichtungen (Prof. Verl) https://www.isw.uni-stuttgart.de/
KIT Karlsruhe: Institut für Industrielle Informationstechnik (Prof. Heizmann) https://www.iiit.kit.edu/index.php
Fraunhofer IPA Stuttgart: Abteilung Roboter- und Assistenzsysteme (Dr. Kraus) https://www.ipa.fraunhofer.de/de/Kompetenzen/roboter--und-assistenzsysteme.html
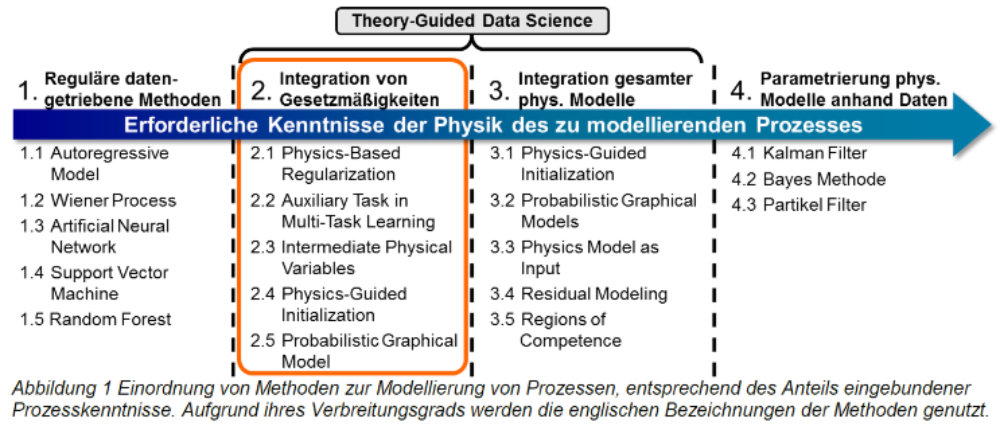
Das Fachgebiet Prognostics and Health Management (PHM) befasst sich mit der Diagnose des aktuellen Degradationszustands technischer Systeme sowie mit der Prognose der weiteren Entwicklung dieses Zustands. Ziel ist die Bereitstellung von Informationen, welche im Rahmen des Health Managements für die Planung und Koordination von Instandhaltungsprozessen oder Systemanpassungen eingesetzt werden. Die Methoden für die Zustandsdiagnose und -prognose werden in der Literatur meist in physikalisch modellbasierte Methoden, datengetriebene Methoden und hybride Methoden unterteilt. Letztere dienen dazu, Unzulänglichkeiten rein datengetriebener Methoden zu kompensieren, indem Kenntnisse über das betrachtete System einbezogen werden, die jedoch als unzureichend für eine ganzheitliche Modellierung des Systems gelten. Denn in der Regel sind grundlegende Kenntnisse über das System und über die Gesetzmäßigkeiten seines Degradationsprozesses vorhanden. Dieser Forschungszweig wird als Theory-Guided Data Science (TGDS) bezeichnet und zielt insbesondere auf die Verminderung der Defizite datengetriebener Methoden ab.
Das Ziel des Forschungsvorhabens ist die Integration von bei PHM anwendungsübergreifend vorliegenden Gesetzmäßigkeiten bzw. Randbedingungen in datengetriebene Methoden zur Zustandsdiagnose und -prognose. Ein Beispiel hierfür ist dass das betrachtete technische System über keine Möglichkeit der Selbstheilung verfügt. Diese überwiegend auftretende Eigenschaft führt dazu, dass der Degradationszustand des Systems monoton zunehmend sein muss. Die Integration derartiger Vorkenntnisse soll eine Verbesserung der Extrapolation in Bereiche mit wenigen oder keinen Trainingsdaten sowie die Einhaltung von Gesetzmäßigkeiten des zu modellierenden Systems ermöglichen. Die dabei zu verfolgenden Ansätze sind Physics-Based Regularization, Auxiliary Task in Multi-Task Learning, Intermediate Physical Variables und Physics-Guided Initialization (siehe Abbildung 1). Während theoretische Vorarbeiten bereits existieren, werden im Rahmen des Forschungsvorhabens dedizierte Lösungen für den Bereich PHM entwickelt, die aufgrund des zentralen Fokus, die anwendungsübergreifende Charakteristik der Gesetzmäßigkeiten zu berücksichtigen, eine entsprechende Breitenwirkung aufweisen.
Abgeschlossene Projekte
Der KI-Online-Kurs aus dem Projekt AKIPro vermittelt anwendungsorientiertes Wissen zur KI in der industriellen Produktion und hilft dabei, diese Technologie in die Praxis zu bringen. Er wurde an den KI-Campus übergeben und ist nun auf dieser Lernplattform verfügbar. Geplant ist, das Angebot auch in Lehrveranstaltungen des IFF sowie Formate des Campus Schwarzwald zu integrieren. Das Besondere: Der KI-Kurs steht nicht nur Studenten und Fachexperten, sondern allen Interessierten offen.
Die nachhaltige Wiederaufarbeitung/Refabrikation von Gerätekomponenten erfordert einen hohen manuellen Arbeitsaufwand. Während die Neuproduktion von einer hohen Normierung der Komponenten in jedem Produktionsschritt profitiert, wirkt sich bei der Refabrikation der Verschleiß jeder Komponente sehr unterschiedlich auf Form oder Oberflächeneigenschaften aus. Dies erschwert die Automatisierung massiv und macht die Neuproduktion – obwohl deutlich weniger nachhaltig – wirtschaftlicher. Gleichzeitig besteht die Herausforderung eines zunehmenden Fachkräftemangels, weshalb es einen großen Bedarf an Automatisierungslösungen im Bereich der Refabrikation gibt.
Dieses Vorhaben bringt Nachhaltigkeit und Wirtschaftlichkeit durch künstliche Intelligenz (KI) in Einklang. KI erlaubt eine automatisierte individuelle Anpassung der Bearbeitung eines Werkstücks. Dies macht die Automatisierung einsetzbar und die Refabrikation im freien Markt gegenüber der Neuproduktion wettbewerbsfähig. Das KI-basierte Bearbeitungssystem verbindet Sensoren für die Objektvermessung und Sichtprüfung mit ausführenden Robotern und passenden Bearbeitungswerkzeugen sowie einem intuitiven Interaktionssystem für den Menschen. Die Aufgabenplanung und kraftgeregelte Bearbeitung durch den Roboter nutzen modernste Methoden des maschinellen Lernens.
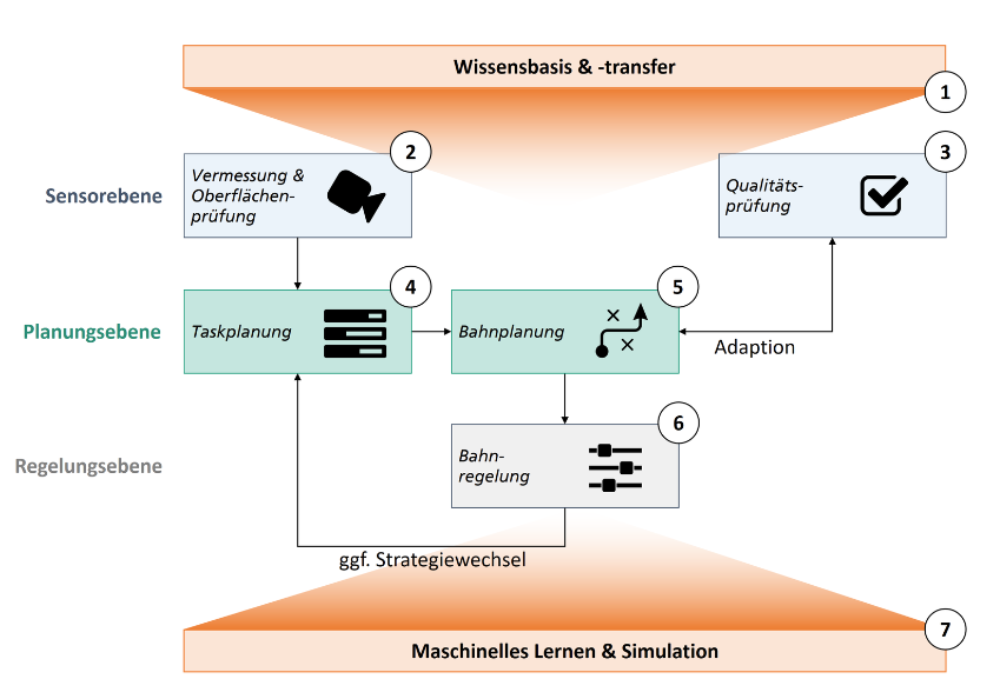
Mit dem derzeitigen Stand der Technik ist eine sehr häufige manuelle und damit teure Adaption von Roboterprogrammen notwendig, so dass der Betrieb nicht wirtschaftlich gestaltet werden kann. Roboter sollen nun in die Lage versetzt werden, sich eigenständig für die Bearbeitungsaufgabe zu programmieren und einzurichten. Konkret besteht das Bearbeitungssystem aus verschiedenen miteinander interagierenden Modulen (siehe Abbildung). Über eine Wissensbasis kann Domänen- und Expertenwissen in Form einer Ontologie und in einer Task-Bibliothek abgelegt und in die Robotersteuerung eingebracht werden (1). Sensoren vermessen das zu bearbeitende Werkstück. Auf der Grundlage der Messwerte können Abweichungen vom Normzustand des Werkstücks ermittelt werden (2). Während des Bearbeitungsvorgangs werden mittels der Sensorik fortwährend der Werkstückzustand und die Bearbeitungsqualität gemessen und bewertet (3). Die Taskplanung legt die abstrakten Bearbeitungstätigkeiten und Sollbewegungen für den Roboter fest (4). Die Bahnplanung erzeugt aus den gewählten Tasks eine Roboterbahn, die zur Bearbeitung verfahren werden muss (5). Die Bahnregelung (6) zielt auf eine schnelle Einregelung der von der Bahnplanung vorgegebenen Kraft- und Positionsbahnen ab, um das gewünschte Bearbeitungsergebnis zu erzielen. Die Verarbeitung der Sensordaten sowie die verschiedenen Planungs- und Regelungsmethoden nutzen Methoden des ML in Kombination mit wissensbasierten Ansätzen (7). Zur automatisierten Roboterprogrammierung wird eine Simulation eingesetzt, die es dem Roboter erlaubt, die für eine Bearbeitungsaufgabe erforderlichen Tätigkeiten optimal zu planen.
Ein adaptives, digitales Gesamtsystem zur automatisierten Wiederaufbereitung unterschiedlicher Gerätekomponenten ist das Ziel des Vorhabens.

Das FutureWorkLab ist ein Innovationslabor für Arbeit, Mensch und Technik am Standort Stuttgart. Die Abteilung Kognitive Produktionstechnik des IFF ist am FutureWorkLab II beteiligt.
Für Montageaufgaben ist die flexible Roboterprogrammierung bislang noch aufwendig. Dies zu verbessern, ist das Ziel des Forschungsprojekts »Rob-aKademI«. Die darin genutzten Technologien, allen voran das Maschinelle Lernen, sollen die Programmierung erleichtern und autonomer machen.
Die Partner im Forschungsprojekt »Rob-aKademI«, darunter das Institut für Industrielle Fertigung und Fabrikbetrieb IFF der Universität Stuttgart und das Fraunhofer IPA, entwickeln Technologien, die die Roboterprogrammierung für Montageaufgaben vereinfachen und mehr automatisieren sollen. Grundlage hierfür ist ein rein digitales Abbild, also ein digitaler Zwilling, der Produktionsumgebung. Dieses Abbild verbunden mit einem speziellen Programmiergerüst wird in einer physikalischen Simulationsumgebung genutzt, um Roboter Fähigkeiten für das flexible Montieren lernen zu lassen. Roboter erkunden in der Simulationsumgebung autonom ihre Umgebung, planen darauf aufbauend ihr Verhalten und optimieren es selbstständig bzw. lernen fortlaufend.
Genutzt wird hierfür Künstliche Intelligenz (KI), und genauer maschinelles Lernen und dessen Teilgebiet des sogenannten »Reinforcement Learning« (RL). Dieses meint, dass ein Algorithmus ähnlich dem Menschen nach dem Prinzip Versuch und Irrtum lernt. Er erhält ein Belohnungssignal für eine gelungene Aktion, um schrittweise besser zu werden.

Ziel des Forschungs- und Entwicklungsprojektes zur KI-basierten Roboterkalibrierung (KIRK) ist es, durch Maschinelles Lernen neue softwaregetriebene Kalibriermethoden für Industrieroboter zu entwickeln, um deren Genauigkeit zu erhöhen. Initiatoren des Gemeinschaftsprojekts sind das IFF der Universität Stuttgart, die DHBW Karlsruhe und der Softwarehersteller ArtiMinds Robotics.
Das Institut für Industrielle Fertigung und Fabrikbetrieb (IFF) der Universität Stuttgart und das Robot-and-Human-Motion-Lab (RaHM-Lab) der Dualen Hochschule Baden-Württemberg Karlsruhe übernehmen im Projekt die Grundlagenforschung.
Pressemitteilung von ArtiMinds Robotics
Presseresonanz im Internet
Artikel in den VDI-Nachrichten
Artikel in der Automationspraxis
Lehre
In der Lehre liegt der Fokus auf der Vermittlung von KI-Methoden aus dem Bereich des maschinellen Lernens und der Planung. Den Studierenden wird aufgezeigt, wie diese Methoden zur Verbesserung von Produktionsprozessen eingesetzt werden können. Neben der Vermittlung theoretischer Konzepte, werden auch praktische Anwendungsfälle betrachtet.
Veranstaltungen
- Big Data Machine Learning
- Kognitive Qualitätsprüfung
- Künstliche Intelligenz im Maschinenbau (ab WS 2024/25)
- Kognitive Produktionssysteme
Studentenjobs
Suchen Sie eine Bachelor-/Masterarbeit oder eine HiWi-Stelle im Bereich eines der oben aufgeführten Forschungsthemen? Interessierte Studierende können sich direkt an uns wenden.
Publikationen des Bereichs Kognitive Produktionssysteme
- P. Dunau, M. Huber, and J. Beyerer, “Gaussian Process based Dynamic Facial Emotion Tracking,” in 2019 IEEE International Conference on Industrial Cyber Physical Systems : Proceedings. 06-09 May, 2019, Taipei, Taiwan, 2019, pp. 248–253. doi: 10.1109/ICPHYS.2019.8780338.
- M. Huber, “Daten als Schlüssel für maschinelles Lernen : Zentrum für Cyber Cognitive Intelligence (CCI) am Fraunhofer IPA hilft beim Einstieg,” Automationspraxis, Art. no. 1–2, 2019, [Online]. Available: https://automationspraxis.industrie.de/industrie-4-0/machine-learning-daten-sind-schluessel-fuer-maschinelles-lernen/
- M. El-Shamouty, K. Kleeberger, A. Lämmle, and M. Huber, “Simulation-driven machine learning for robotics and automation,” TM Technisches Messen : Plattform für Methoden, Systeme und Anwendungen in der Messtechnik, Art. no. TOnline31.08.2019, 2019, doi: 10.1515/teme-2019-0072.
- M. Huber, “Daten sind der Schlüssel für maschinelles Lernen : Künstliche Intelligenz ermöglicht vorausschauende Wartung und neue datenbasierte Dienstleistungen,” mav : Innovation in der spanenden Fertigung, 2019, [Online]. Available: https://mav.industrie.de/peripherie/software/daten-sind-der-schluessel-fuer-maschinelles-lernen/
- W. Kraus, B. Winkler, and M. Huber, “Maschinelle Lernverfahren für Roboteranwendungen,” atp magazin : Transforming Automation, Art. no. 1–2, 2019.
- M. Huber and N. Schaaf, “Extraktion von Erklärungen zu Produktionsprozessen aus künstlichen Neuronalen Netzen,” in Blick in die Blackbox : Nachvollziehbarkeit von KI-Algorithmen in der Praxis, Berlin, 2019, pp. 62–72.
- M. Huber, “Fallstudie: Predictive Maintenance,” in Data Science : Grundlagen, Architekturen und Anwendungen, Heidelberg: dpunkt.verlag, 2019, pp. 225–244.
- M. Huber, “Machine Learning für Produktion und Robotik,” Automationspraxis, vol. 2019, Art. no. 11, 2019.
- P. Dunau, M. Huber, and J. Beyerer, “Comparison of Angle and Size Features with Deep Learning for Emotion Recognition,” in Progress in Pattern Recognition, Image Analysis, Computer Vision, and Applications : 23rd Iberoamerican Congress on Pattern Recognition. November 19-22, 2018, Madrid, Spain, Cham: Springer Nature, 2018, pp. 602–610. doi: 10.1007/978-3-030-13469-370.
- FORSCHUNG LEBEN berichtet
-
Im Universitätsmagazin FORSCHUNG LEBEN erschien in der Frühjahrsausgabe 2019 ein umfangreicher Artikel über die Forschungsarbeiten zur Künstlichen Intelligenz an der Universität Stuttgart. Redakteurin Andrea Mayer-Grenu besuchte auch die IFF-Abteilung Kognitive Systeme und ließ sich von Professor Marco Huber erklären, was es mit KI auf sich hat.

Marco Huber
Univ. Prof. Dr.-Ing.Stellvertretender Institutsleiter, Inhaber des Lehrstuhls Kognitive Produktionssysteme